实验内容
content of the experiment
一、三相异步电机自锁继电器控制
实验原理
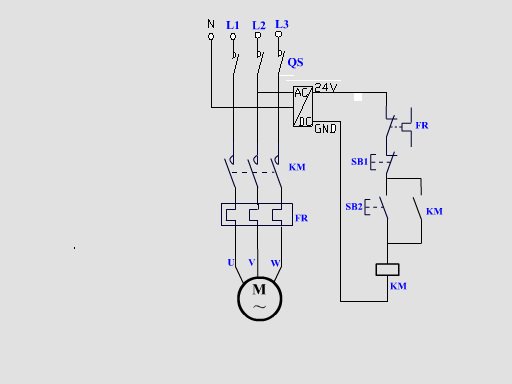
三相异步电机自锁继电器控制原理如图所示。当启动电机时合上电源开关QS,按下启动按钮SB2,接触器KM线圈得电,KM主触点闭合,使电机M运转;松开SB2,由于常开辅助触点闭合,使电机M运转;松开SB2,由于接触器KM的常开辅助触点闭合自锁,控制电路任保持接通,电动机M继续运转。停止时按SB1,接触器KM 线圈断电,KM 主触点断开,电机M停转。
实验仪器和设备
JDY综合实验台 一台
多功能电源模块 一块
继电器控制模块 一块
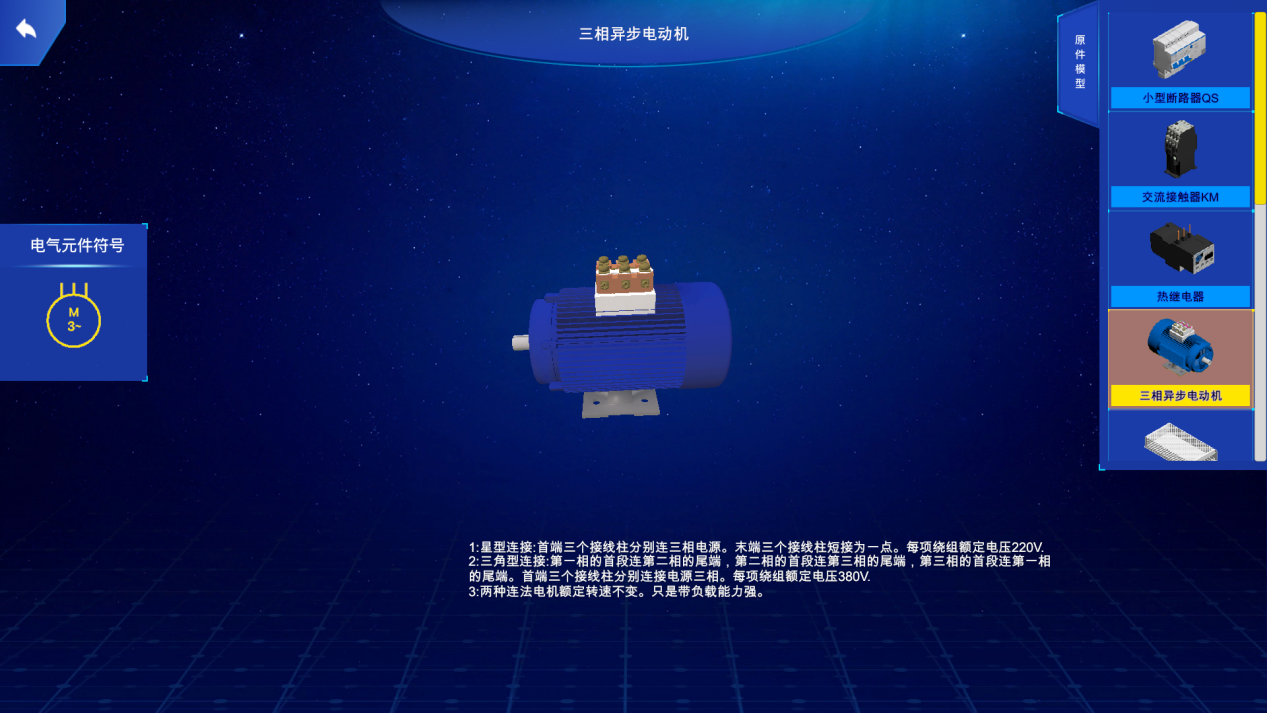
三相交流异步电动机 一台
护套插接线 若干
操作步骤
根据实验要求选择元器件。
按照原理图连接线路。按照先控制电路后主电路的原则进行。
上电操作。看电机的运转情况确定实验的正确与否,若有故障,应立即断电并重新连接,一直到排出故障为止。
实验完毕后,切断电源后整理好实验台,把元器件放回原来的位置。
二、三相异步电机正反转继电器控制实验
实验原理
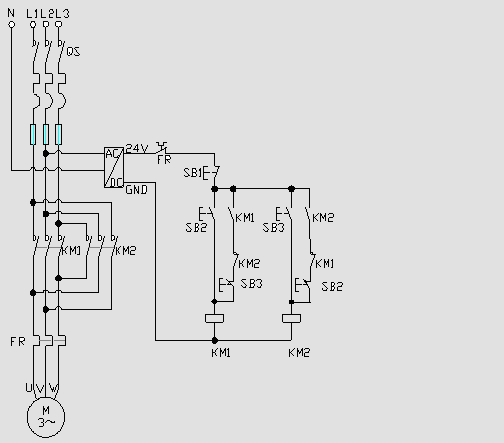
机床的工作部件常需要作两个相反方向的运动,大都靠电动机的正反转来实现。实现电动机正反转的原理很简单,只要将电动机的三相电源中的任意两相对调,就可以使电动机反相运转。
参考电路原理图:
用接触器联锁的正反转控制线路。
实验器材
JDY综合实验台 一台
多功能电源模块 一块
继电器控制模块 一块
三相交流异步电动机 一台
护套插接线 若干
实验步骤
按实验要求画出原理图,认真检查,确认无误后,按图连接好控制电路,上电操作,看继电器的动作情况确认连接的正确与否,确认正确后再接入主电路。
实验完毕后,停止总电源并整理好实验器材。
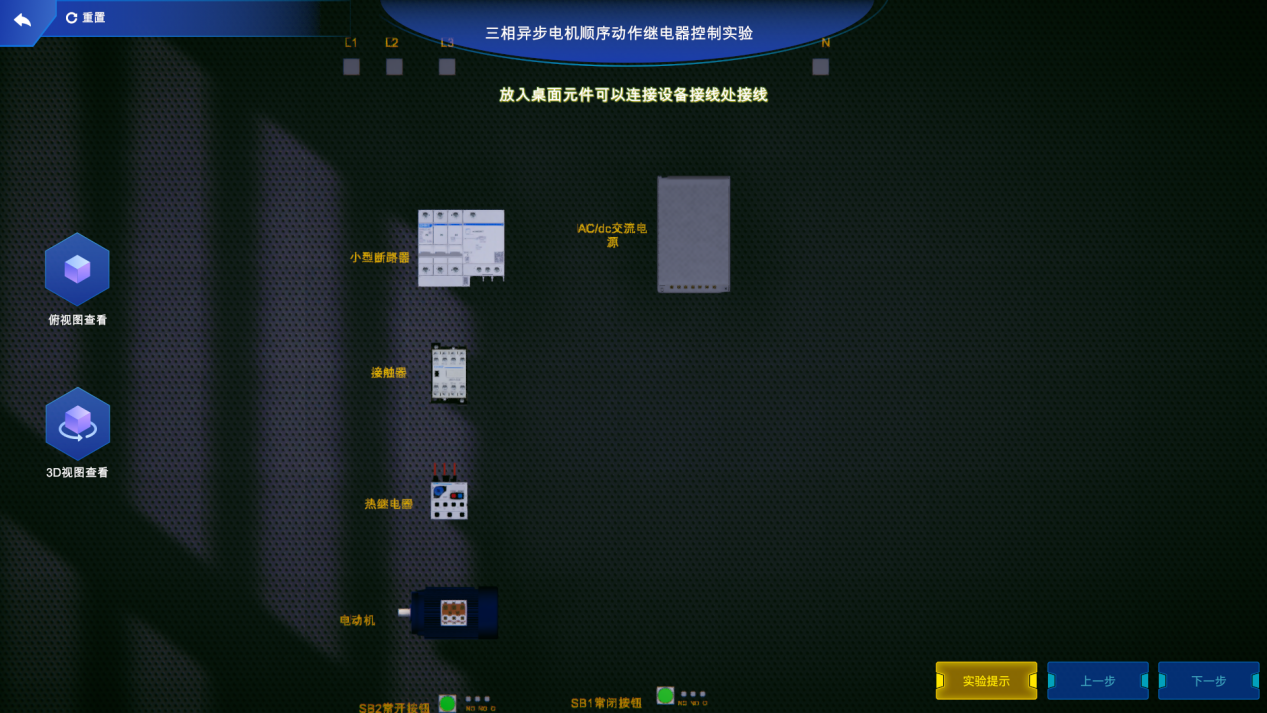
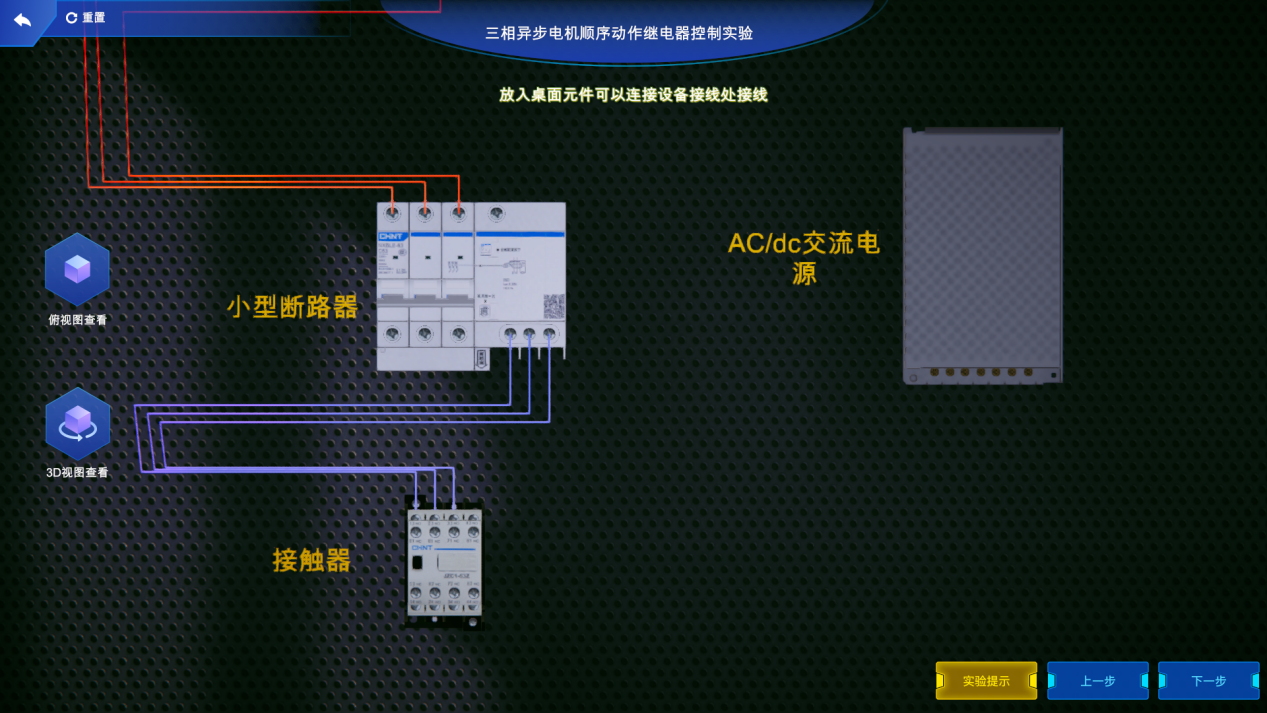
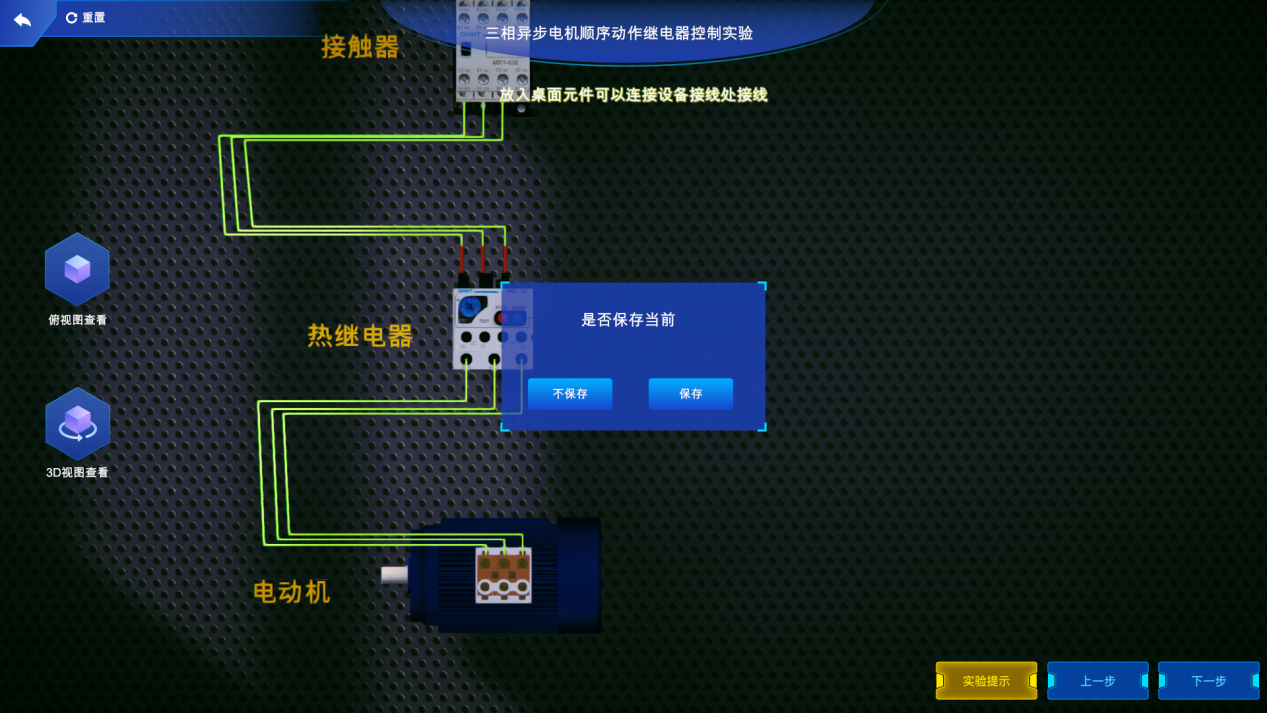
三、三相异步电机顺序动作继电器控制实验
实验简介
在实际工作中,经常要求电动机有顺序地起动。如某些机床主轴必须在油泵工作后才能起动;铣床主轴旋转后,工作台方可移动等等,这些都要求电动机有顺序的起动工作。本实验即为两台电动机顺序起动的控制实验,为实验方便电动机工作过程设计为:电动机1起动5s后,电动机2自动起动,共同运转,按下停止按扭电动机2停止,如果按下急停按钮,则电动机1、2同时停止。
电路原理图如下
实验步骤及内容
绘制两台电动机顺序起动控制的电气原理图。
根据电路图连接电路。
接通电源,操作启动按钮,观察电动机的动作。若动作不正常,应排除故障。
四、三相异步电机Y—△ 继电器控制
实验原理
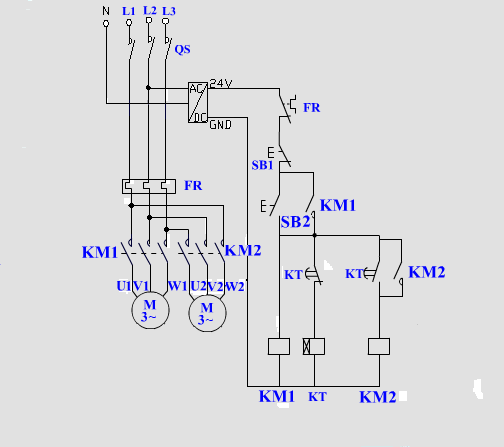
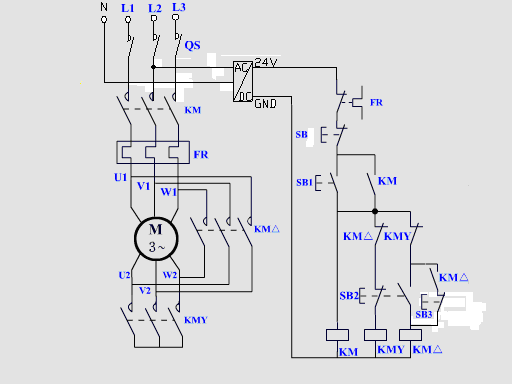
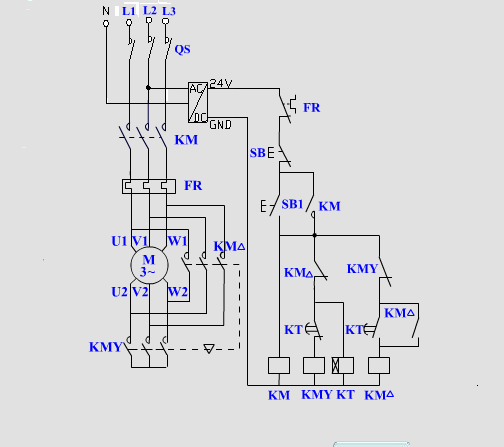
电动机正常运行时,其定子绕组接成△形,此时每相绕组所承受的电压为电源的线电压(380V);起动时接成Y形,每相绕组所承受的电压为电源的相电压(220V),起动完毕时再自动换接成△形运行。
实验原理图:
继电器控制。
时间继电器控制。
实验步骤
按实验要求画出电路图
依据电路图连接电路,插线时注意连接的方向,可自己制定连接的原则。如:上端进线,下端出线;从正极到负极,先控制电路再主电路的方法连接。
实验控制电路,看继电器的是否动作确定连线的正确与否,若有故障,必须排除故障后再接入主电路,观察电机的运行情况。
实验完毕后,整理好实验台,并将元器件放回规定的位置。
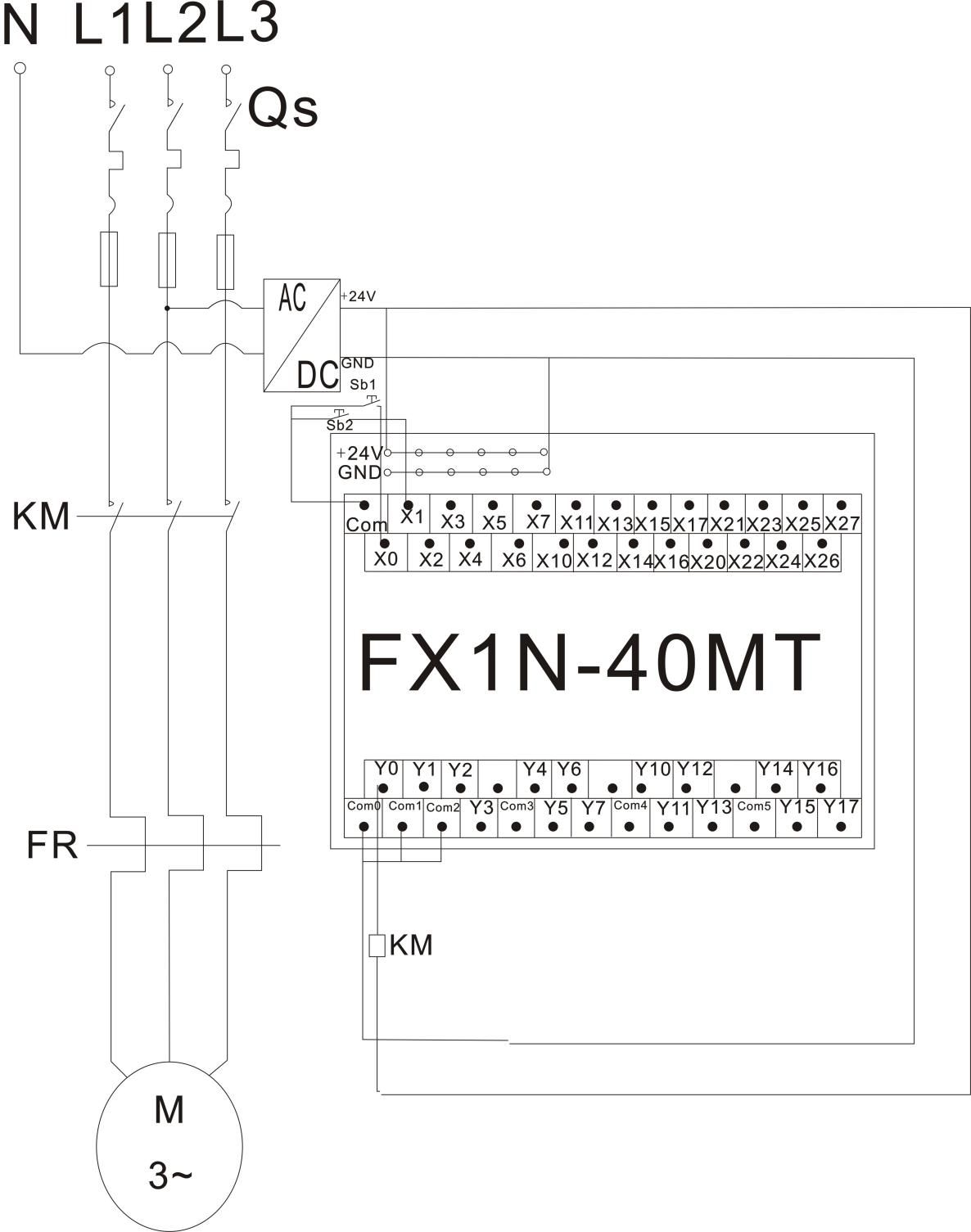
五、三相异步电机PLC控制自锁实验
实验原理
传统上,是用接触器直接实现这一过程的,电路原理图可参三相异步电机自锁继电器控制实验。
这种电路有可移植性差、电路结构复杂、手动高压操作等缺陷,而且现今在工业生产过程中,需要大量离散量的数据采集,进行大量的开关量顺序控制,使它们按照逻辑条件进行顺序动作,并按照逻辑关系进行连锁保护动作的控制,这些都对系统自动化提出很高要求,因而这种传统的控制电路在大型的系统中已很少使用。取而代之的是由PLC、单片机、工控机等组成的控制系统。
可编程控制器PLC(Programmable Logic Controller)是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。可编程序控制器及其有关设备,都按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计,具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点。PLC在工业自动化控制特别是顺序控制中得到广泛应用。因此,从本节开始的五个小实验都采用PLC控制,以在实现目标运动的同时,使同学们逐步加深对PLC设备的认识、了解并能够对其熟练应用。
本小节实验电路图如下(以三菱公司的FX1N-40MT系列PLC为例)
实验步骤
读懂实验要求后画出电路图。
依据控制电路图写出PLC控制程序。
按图连接电路并仔细检查,确保无误后接通电源。(注意PLC的输出口采用继电器控制输出口来控制,避免负载过大而烧坏PLC)
将编写好的PLC程序传输到PLC,开始实验。
实验完毕后,断开电源,整理实验台,并把元器件整理好后归回原位。
六、异步电动机顺序动作PLC控制
实验简介
在实际工作中,经常要求电动机有顺序地起动。如某些机床主轴必须在油泵工作后才能起动;铣床主轴旋转后,工作台方可移动等等,这些都要求电动机有顺序的起动工作。本实验即为两台电动机顺序起动的控制实验,为实验方便电动机工作过程设计为:电动机1起动5s后,电动机2自动起动,共同运转10s后,电动机2先停下来,延时3s后,电动机1也停止。如果在运转过程中按下急停按钮,则电动机1、2同时停止。
传统上,是用接触器直接实现这一过程的,电路原理图可参照教科书或三相异步电机顺序动作继电器控制实验。
本实验采用PLC控制,以在实现目标运动的同时,使同学们逐步加深对PLC设备的认识、了解并能够对其熟练应用。本实验所用三菱公司的FX1N-40MT型号PLC的基本指令用法可参考附录中梯形图程序。
电路图如下:
同学可自行比较采用传统控制和采用PLC控制的差异。
实验仪器和设备
计算机 一台
PLC(三菱) 一套
JDY 综合实验台 一台
多功能电源模块 一块
可编程控制器输入板 一块
继电器控制模块 一块
三相交流异步电动机 二台
插接线 若干
实验步骤及内容
在GX Developer环境下绘制出梯形图。
根据电路图连接电路。
接通电源,传送PLC程序。
电动机不供电,监测PLC动作是否正确。若不正确,应排除故障。
本实验的电动机运转过程设计有实际意义吗?若有,可用于何种情况?
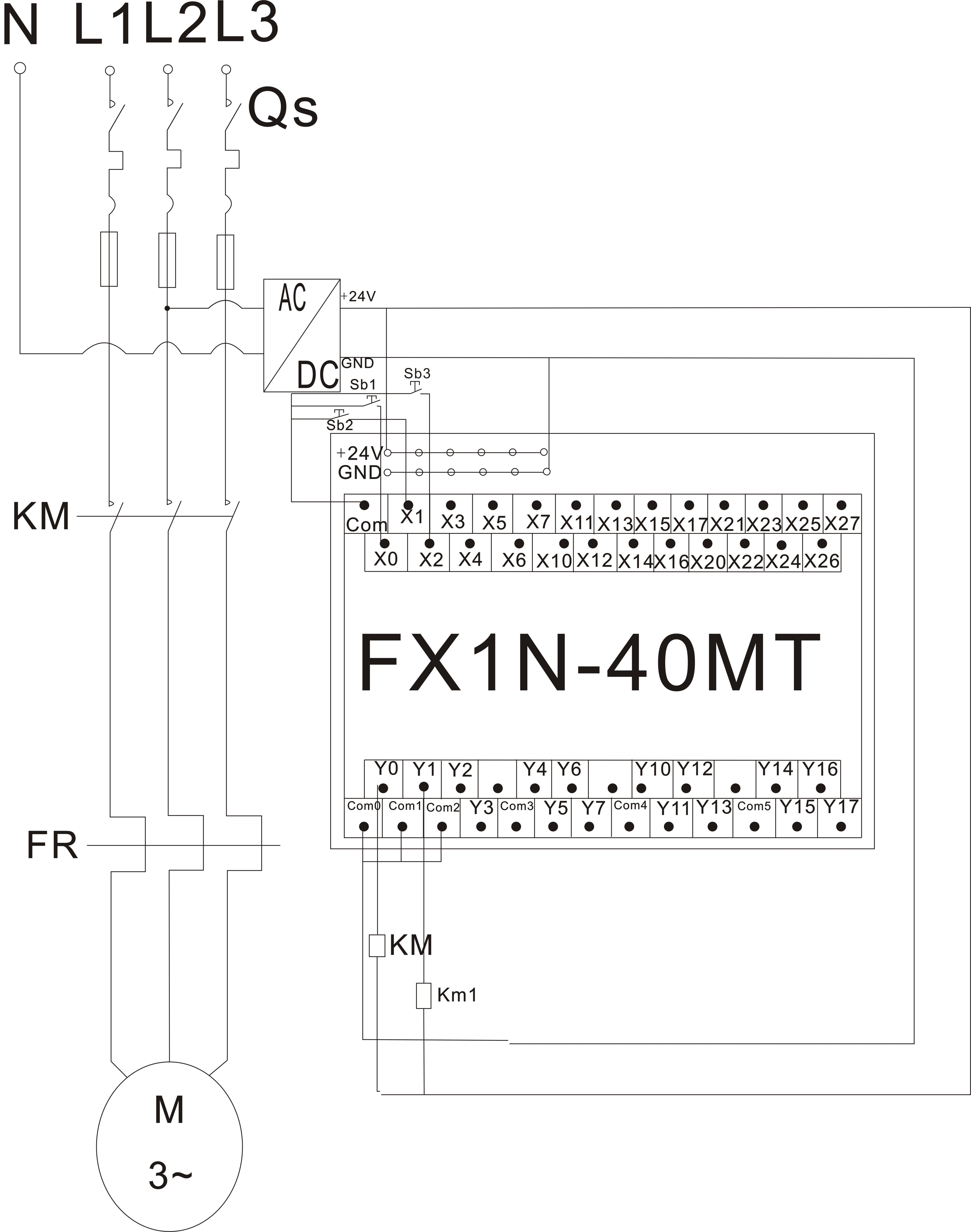
七、异步电动机正反转PLC控制
实验简介
传统上是用接触器直接实现这一过程的,电路原理图可参照教科书或三相异步电机正反转继电器控制实验。
本实验采用PLC控制正反转,电路简图如下

实验仪器和设备
计算机 一台
PLC(三菱) 一套
JDY 综合实验台 一台
多功能电源模块 一块
可编程控制器输入板 一块
继电器控制模块 一块
三相交流异步电动机 一台
插接线 若干
实验步骤及内容
在GX Developer环境下绘制出梯形图。或调用“……”文件中的梯形图, 根据电路图连接电路。
检查确认后,接通电源,传送PLC程序。
电动机不供电,监测PLC动作是否正确。若不正确,应排除故障。
电动机供电,操作按钮,观察电动机的动作。若动作不正常,应排除故障。
注意事项
仔细检查过后才能开启电源,接通电路。尤其是学有余力的同学在运行自己设计的程序,自己设计的电路图时,一定要征询实验指导老师的意见,在老师同意,并检查通过后才可以进行程序传送,电路连接。并要在断电的情况下才能进行拆、接线。
由于电动机的工作电压为380V,因此在电源,尤其是强电电源接通后不要用手接触电动机或实验台。同学们一定要注意安全。